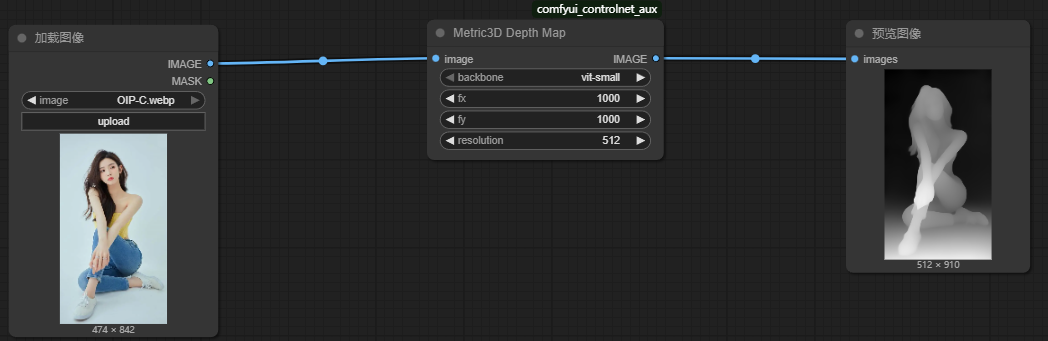
Metric3D Depth Map
节点功能:该节点使用Metric3D模型生成真实比例的深度图(metric depth map),图中每个像素的灰度值表示它离相机的真实物理距离(例如:以“米”为单位),可用于真实感图像生成、三维建模、光照计算等任务。
Metric3D Depth Map - 节点参数说明
| 输入参数 | |
| image | 输入图像(RGB),支持单张或多帧图像。建议输入清晰无遮挡的人物、室内或场景图像,支持批量帧输入(如视频帧序列)。 |
| 输出参数 | |
| IMAGE | 输出的真实深度图,像素值代表距离远近(越亮越远)。 |
| 控件参数 | |
| backbone | 选择使用的 Metric3D 网络主干结构: • vit-small • vit-large • vit-giant2 vit-small 速度快,精度中等;vit-large 精度更高但推理慢;vit-giant2 精度最高,适合高端 GPU 使用。 |
| fx | 相机的水平焦距(单位像素)。模拟真实相机的投影参数。若不清楚具体值,保持默认值 1000。适当增大 fx 可模拟长焦距变焦镜头。 |
| fy | 相机的垂直焦距(单位像素)。一般与 fx 相等即可,除非你想模拟非等距的特殊相机镜头模型。 |
| resolution | 模型推理时图像的缩放尺寸。建议使用 512 或更高分辨率以获得更丰富细节。输入图像将会缩放到该值做推理,输出再恢复原分辨率。 |